Citation
If our work helps your research, please cite:
@inproceedings{
qian2026sat3dgen,
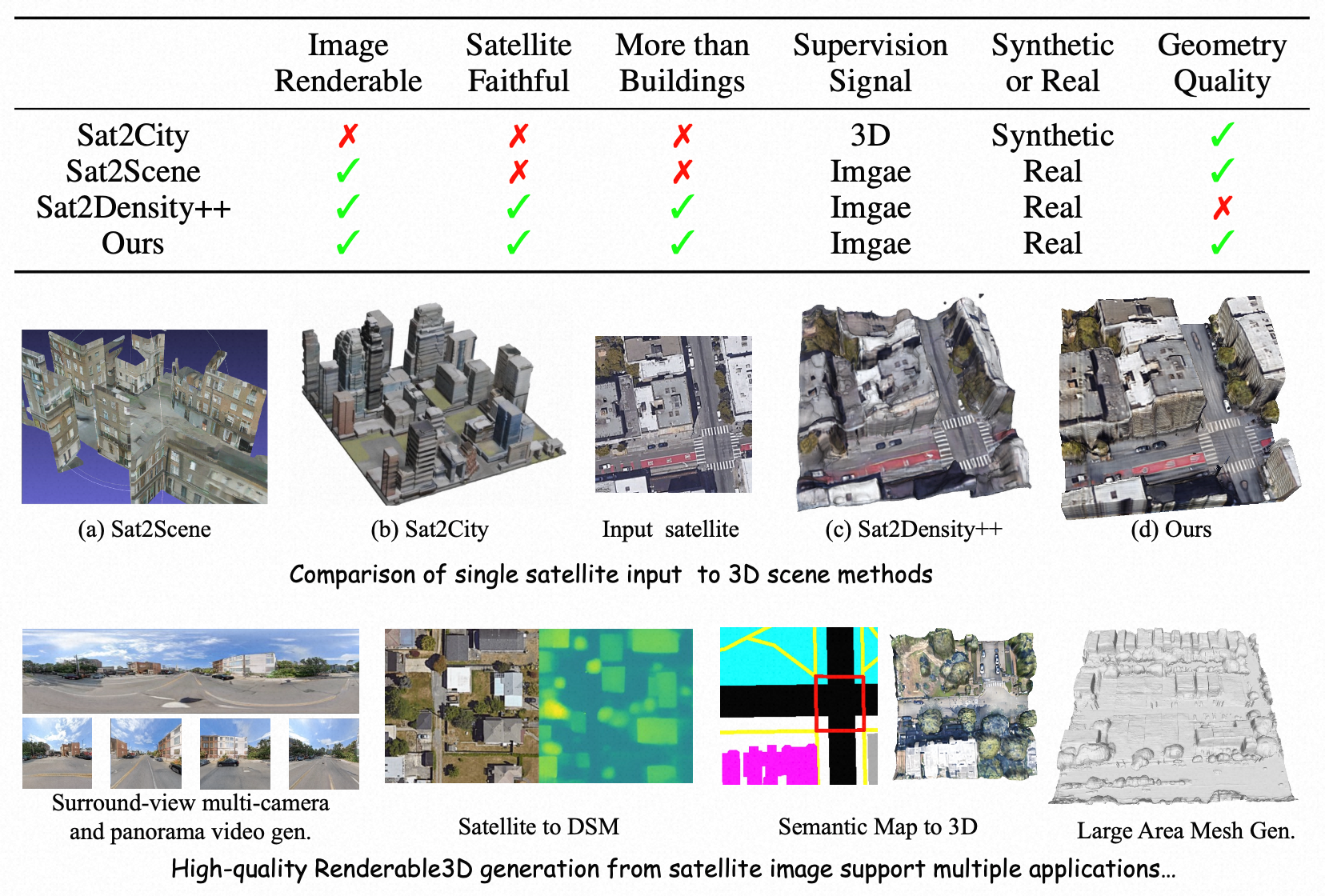
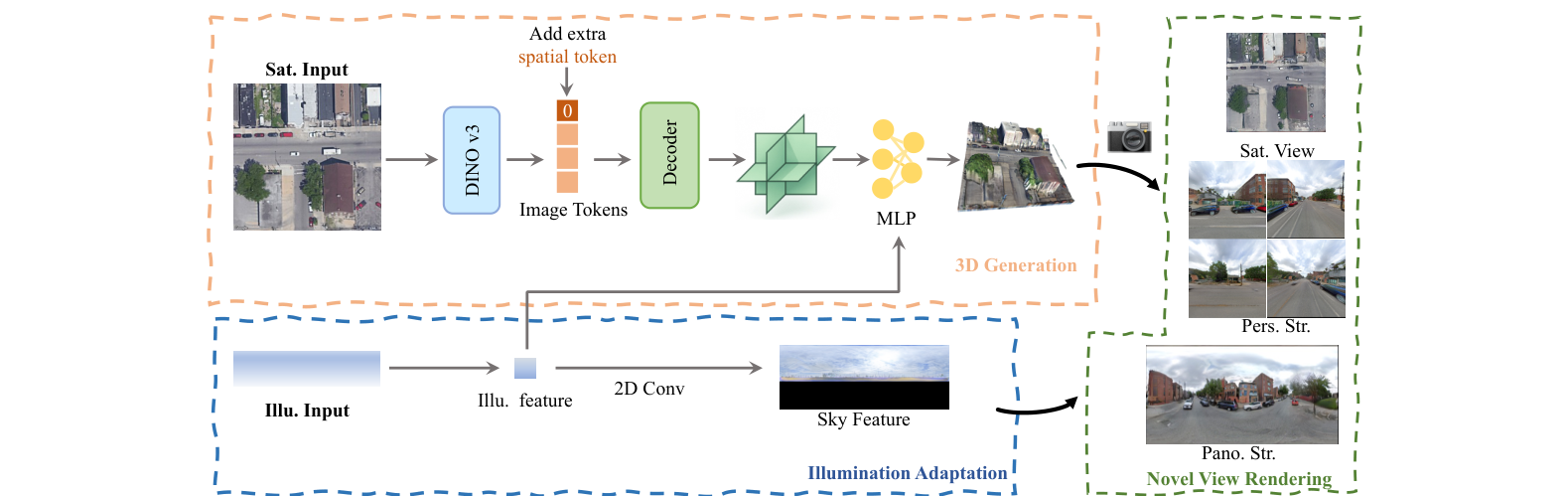
title = {Sat3DGen: Comprehensive Street-Level 3D Scene Generation from Single Satellite Image},
author = {Ming Qian and Zimin Xia and Changkun Liu and Shuailei Ma
and Wen Wang and Zeran Ke and Bin Tan and Hang Zhang and Gui-Song Xia},
booktitle = {The Fourteenth International Conference on Learning Representations (ICLR)},
year = {2026},
url = {https://openreview.net/forum?id=E7JzkZCofa}
}
Related line of work (satellite → street / density):
@ARTICLE{Qian_2026_Sat2Densitypp,
author = {Qian, Ming and Tan, Bin and Wang, Qiuyu and Zheng, Xianwei and Xiong, Hanjiang and Xia, Gui-Song and Shen, Yujun and Xue, Nan},
journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence},
title = {Seeing Through Satellite Images at Street Views},
year = {2026},
volume = {48},
number = {5},
pages = {5692--5709},
doi = {10.1109/TPAMI.2026.3652860}
}
@InProceedings{Qian_2023_Sat2Density,
author = {Qian, Ming and Xiong, Jincheng and Xia, Gui-Song and Xue, Nan},
title = {Sat2Density: Faithful Density Learning from Satellite-Ground Image Pairs},
booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)},
month = {October},
year = {2023},
pages = {3683--3692}
}